Introduction
2 minute read
NOTE: For the latest features see the release notes

Motorcortex is a collection of libraries and tools to build Hard-Real-Time Control Systems. Motorcortex has extremely fast, open and secure communication built-in that is also natively supported by web-browsers. Motorcortex provides simple interfaces for complex functions like developing software for hard-realtime, communication with industrial EtherCAT hardware and accessing the data of your application. With Motorcortex you can focus on the task you, as a developer, need to perform: to get your robot or machine working as fast as possible.
Motorcortex provides Open Source Client Libraries allowing all kinds of Applications built on top of a Control System, such as super-smooth visualization or user interfaces in the browser, data logging and analysis tools in Python or integrate a Motorcortex system with other frameworks like ROS. The modern communication is super fast and super scalable allowing connections to hundreds of clients simultaneously
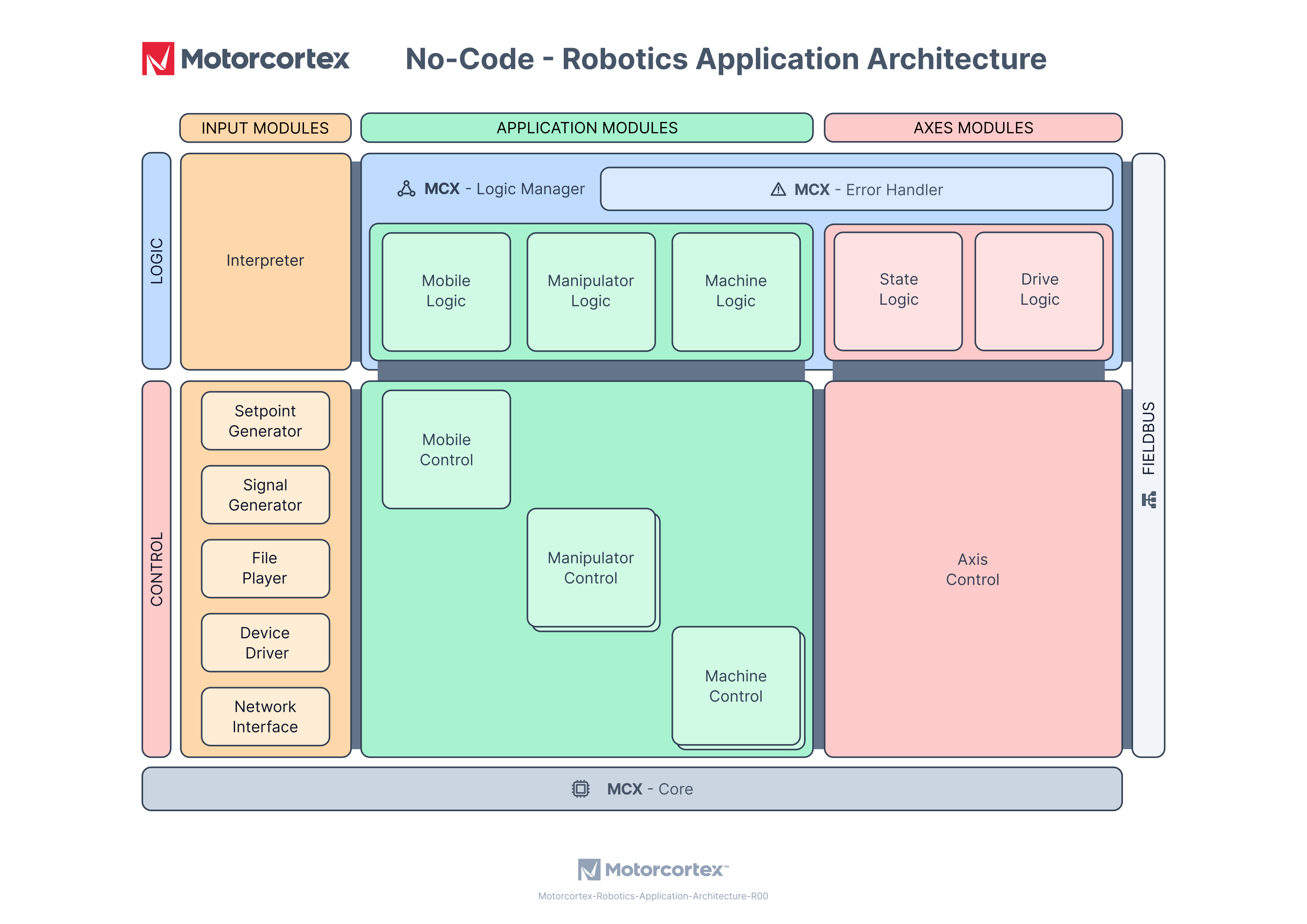
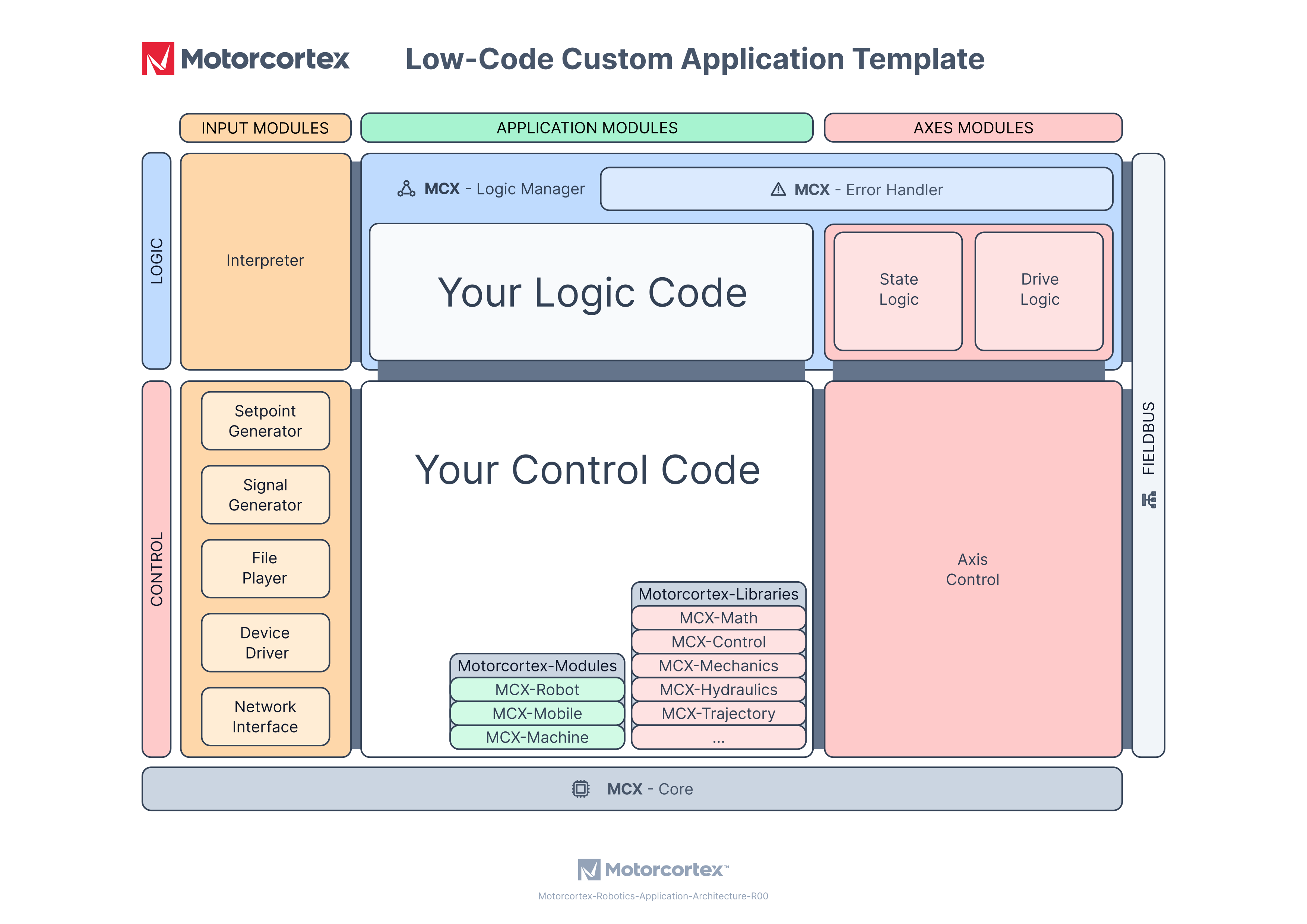
Users can choose between two levels of development:
- No-Code Development With No-code development users can make use of pre-made apps. These apps can be reconfigured for custom hardware GUI’s can be customized to any need. Interacting with the app is possible using out API’s to create new functions and features.
- Low-Code Development With Low-code development users can build their own application themselves from scratch in C++. For these developers there are libraries available to use in any project.
On this website you will find the documentation to learn working with Motorcortex. For new users it is recommended to start with the Getting started section. In this section you will learn the basics of using Motorcortex.
The Standard Applications are pre-made apps. In this section contains the explanation on how to use these applications.
Motorcortex.io contains a lot of tools to help users with their development. In this section All of the tools and their functionalities are explained.
Client applications are non-realtime applications but support multiple languages like Python C++ and Java Script. In Developing Client Applications users will find all the information and tutorials needed to get started creating Client application in Motorcortex.
Control applications are realtime application running on the controller generally containing control loops and state machines. In Developing Control Applications you will find all the information and tutorials needed to get started creating Control application in Motorcortex.
The section Software Maintenance provide explanations how to configure and maintain you Motorcortex controller.
If there are any questions make sure to checkout support.motorcortex.io. And feel free to start a new discussion.