Joint Jog Limiters
How To Configure Joint Jog Limiters
less than a minute
The Joint Jog limits are an important safety feature that restrict the manual jog movement range of individual robot joints.
Note
Switching to jog mode outside the defined joint jog limiters, will trigger an WA_JOG_JOINT_JOYSTICK_OUTSIDE_LIMITERS_ERROR. Outside the limits you can only move toward the limits.
Configure Joint Jog Limiters via the GUI
You can define the joint jog limiters per axis through the GUI under the Axis Limiters Tab.
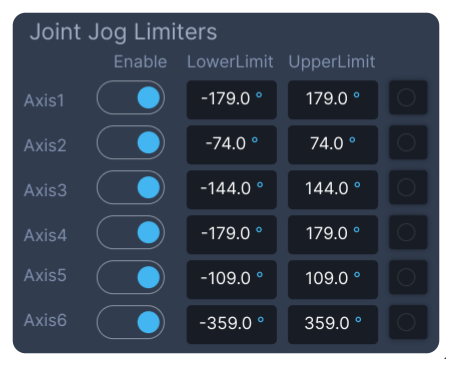
-
You can
enablethe joint jog limiters per axis. -
Define the
position lower and upper limitper axis. -
A warning light per joint indicates if the limiter is activated.
-
Save Configuration
- Press Save Settings to store all your changes.
Configure joint jog limiters via the DESK-Tool
To configure joint jog limiters for an axis (e.g., axis 1) using the desk-tool:
| GUI parameter: | Description: | Desk Parameter: |
|---|---|---|
| Joint Jog Limiters | ||
| Enable | Enables Joint Jog Limiter | root/ManipulatorControl/jointCompliance/Controllers/admittanceControl01/positionIntegrator/outputLimiterEnable |
| Lower Limit | Lower Position Limit | root/ManipulatorControl/jointCompliance/Controllers/admittanceControl01/positionIntegrator/outputLimiterMin |
| Upper Limit | Upper Position Limit | root/ManipulatorControl/jointCompliance/Controllers/admittanceControl01/positionIntegrator/outputLimiterMax |
| Limiter Active Light | Indication if Limiter is active | root/ManipulatorControl/jointCompliance/Controllers/admittanceControl01/positionIntegrator/outputLimiterIsActive |