Manipulability
2 minute read
Manipulability
The Manipulability indicates how close the robot to a singular pose is. If the robot is in a singular pose, the manipulability is 0. Switching to Manual Cartesian in a singular pose could lead to position jump. To avoid this you can enable and adjust the Manipulability Detector such that you are never able to start your robot in manual cartesian mode.
Actual Manipulability
The actual manipulability can be found via the DESK-tool in the path:root/ManipulatorControl/manipulabilityDetector/input. To understand the relation between robot pose and manipulability, you should switch the robot to manual joint mode and open the actualManipulability. Move each joint separately, in order to figure out which joints have influence on the manipulability of your robot. Try to understand how the robot behaves and adjust the Actual Manipulability Gain Lookup table such, that you have a smooth transition.
Warning
Changing Manipulability Gains can lead to potential robot jumping, always adjust the parameters in simulation mode! When tested in Simulation mode and the robot does not jump, you can switch to production mode.
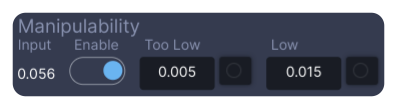
Configure the manipulability detector via the GUI
You can configure the manipulability detector for the robot through the GUI under the Alarms Tab.
-
You can
enableordisablethe manipulability detector. -
Define the
Lowthreshold value. If theinputexceeds the defined threshold value aWarningis triggered. -
Define the
Too Lowthreshold value . If theinputexceeds the defined threshold value aEmergency Stopis triggered. -
Save Configuration
- Press Save Settings to store all your changes.
Configure the manipulability detector via the DESK-tool
| GUI parameter: | Description: | Desk Parameter: |
|---|---|---|
| Manipulability Detector | ||
| Input | Acceleration position value | root/ManipulatorControl/manipulabilityDetector/input |
| Enable | Enable switch | root/ManipulatorControl/manipulabilityDetector/enable |
| Threshold Value | ||
| TooLow | Lower emergency stop threshold | root/ManipulatorControl/manipulabilityDetector/tooLow |
| Low | Lower warning threshold | root/ManipulatorControl/manipulabilityDetector/Low |
| Trigger Signal | ||
| isTooLow | Lower emergency stop trigger | root/ManipulatorControl/manipulabilityDetector/isTooLow |
| isLow | Lower warning trigger | root/ManipulatorControl/manipulabilityDetector/isLow |
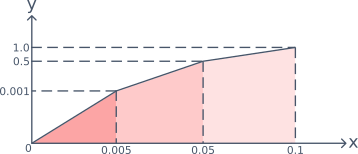
Manipulability Gain Scheduling
The actual manipulabilityGain defines, the gain applied to the movement, if the gain = 0 the rate of movement = 0.
With the manipulabilityGainLookup you can define the rate of deceleration towards a singular pose.
Desk-Tool Path: root/ManipulatorControl/manipulabilityGainLookup
| Parameter | Description |
|---|---|
| input | The input is linked to the actualManipulability. |
| numPoints | The numPoints indicate how many table values are used. |
| output | Indicates the manipulabilityGain as result of the lookup table. |
| x | In the x table, you define the actual manipulability for each range xn, x(n+1), … |
| y | In the y table you define the manipulabilityGain based on the actual manipulability range yn, y(n+1), … |