Main Controls Explained
4 minute read
The main function of the Main Controls is to switch on/off the robot and control the robot manually or automatic:
How to use main controls:
- Switch
on/offrobot.Switch On Switch Off
Switch Off
After the system is switched on the Manual cart and Manual joint modes become visible in the Main Controls.
-
Pressing
manual cartmode activates the cartesian coordination system. Enabling you to translate inx,yandzdirection withTranslation-joystickand rotate aroundx,yandzaxes with therotation-joystick.
Translation Joystick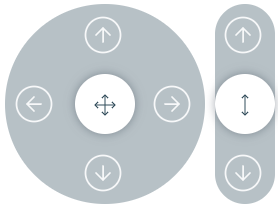 Rotation Joystick
Rotation Joystick
-
Pressing
manual jointmode activates joint mode. Enabling you to rotate each joint independently from each other.
Joint rotation Joysticks
-
The gripper is used to pick up and drop down items, enable
Gripperwill close the gripper.
-
If you deployed a program, you can press
playbutton to start the program. If the robot is not in it’s initial start position it will not start. You should bring the robot to its initial start position. -
You can move the robot towards its initial start position by means of: pressing
move to startand then keep pressingHOLD to move to startuntil the robot reached its start position. Now you can pressplayto start the program.
The program keeps running until it is done or interrupted.
- You can press
pauseto temperately interrupt the program and pressplayto continue. - You can press
stopto exit the running program. - You can adjust the
timescaleto slow down er speed up your robot program. at 0% the robot does not move, at 500% the robot moves with 5 times its initial speed.