Function
6 minute read
In the function block menu you can select function blocks to set up a program.
With the
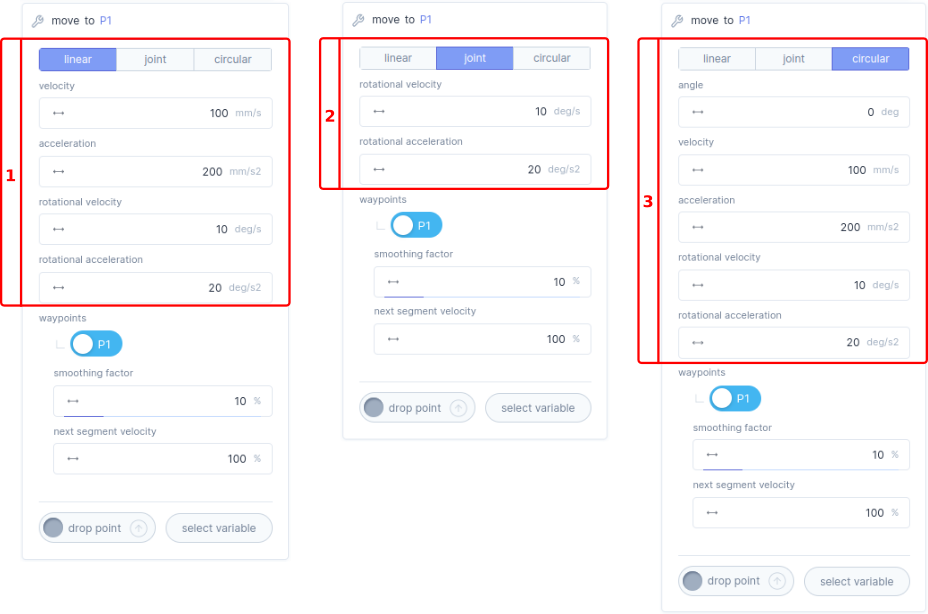
move function block, you can move the robot by means of defining a path express in waypoints. You can assign a variables like points to waypoints. The robot can move to these waypoints in three different ways: linear, joint or circular. The path from one waypoint to another is called a segment and can be parametrized as described in the table below.
| Bar | Description |
|---|---|
| Linear | If you select linear mode the motion between the specified waypoints is executed in cartesian-space. |
Velocity |
Here you can define the velocity
of the linear movement in mm/s. |
Acceleration |
Here you can define the acceleration
of the linear movement in mm/s2. |
Rotational velocity |
Here you can define the rotational velocity
of the axis orientation in deg/s. |
Rotational acceleration |
Here you can define the rotational acceleration
of the axis orientation in deg/s2. |
| Joint | If you select joint mode, the motion between the specified waypoints are executed in joint-space. |
Rotational velocity |
Here you can define the rotational velocity
of the joints in deg/s. |
Rotational acceleration |
Here you can define the rotational acceleration
of the joints in deg/s2. |
| Circular | If you select circular mode, the motion between the specified waypoints is executed as a circular motion throughout the waypoints. |
Angle |
Here you can define the maximum allowable angle
of the motion deg. |
Velocity |
Here you can define the velocity
of the circular movement in mm/s. |
Acceleration |
Here you can define the acceleration
of the circular movement in mm/s2. |
Rotational velocity |
Here you can define the rotational velocity
in deg/s of the axis orientation in deg/s. |
Rotational acceleration |
Here you can define the rotational acceleration
in deg/s2 of the axis orientation in deg/s2. |
| General | In here you can assign a variable to the waypoint. |
Waypoint |
A waypoint is a variable like a geometric point to which the robot can move, you can have multiple waypoints in one
move function block. |
Smooth factor |
With smooth factor
you can smooth out the motion path between segments. This factor can be adjust in a range of 0 till 50%. |
Next segment velocity |
With next segment velocity
you can change the velocity for the next segment, the next segment velocity is defined as % of the parametrized initial velocity. |
Pressing
button gives you the option to delete the function block. |
With the
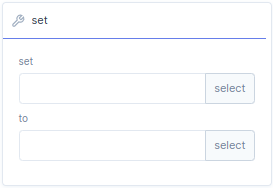
set function block, you can set variables or parameters to a specific value, or link to existing variables.
| Bar | Description |
|---|---|
set |
If you select set a menu will open where you can select a parameter or a local/global variable. |
to |
With to you can assign the set parameter to value, expression, parameter, local/global variable or function. |
Pressing
button gives you the option to delete the function block. |
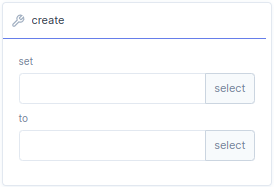
With the
create function block, you can create or assign local variables to a existing program.
| Bar | Description |
|---|---|
set |
With set you can create a new local variable, or press select to assign a existing local variable or geometry. |
to |
With to you can assign a value, expression. or press select to assign an existing program. |
Pressing
button gives you the option to delete the function block. |
With the
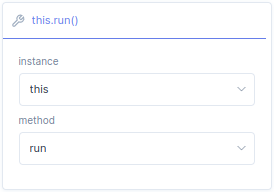
call function block, you can call function that you can create with
create. A program can contain multiple methods, a methods can be compared with a sub program. In the call function block you can specify which method of the program you want to call.
| Bar | Description |
|---|---|
instance |
With instance you select a
create variable which is assigned to a program. The default setting is this referring to the current program. |
method |
A instance contains a program that can have multiple methods, with method you can select one of the methods inside the program. The default setting is run referring to the first method of the current program. |
Pressing
button gives you the option to delete the function block. |
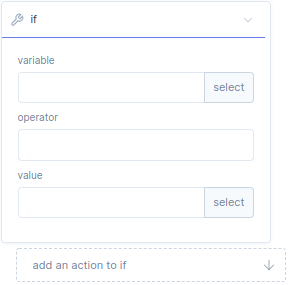
With the logic if function block, you can create a if-statement for a parameter, variable, function or program.
| Bar | Description |
|---|---|
Variable |
Here you define a value for the if statement, or press select to assign parameters, variables, functions or programs. |
Operator |
Here you define a function that acts on variable and value. |
Value |
Here you define a value, or press select to assign parameters, variables, functions or programs |
Add an action to if |
Here you can add function blocks, which will be executed after if statement is true. |
Pressing
button gives you the option to delete the function block. |
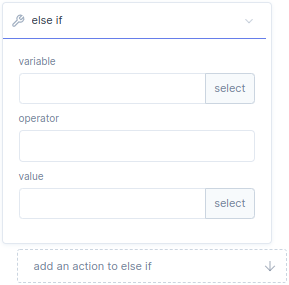
With the logic elif function block, you can create a elif-statement for a parameter, variable, function or program.
| Bar | Description |
|---|---|
Variable |
Here you define a value for the elif statement, or press select to assign parameters, variables, functions or programs. |
Operator |
Here you define a function that acts on variable and value. |
Value |
Here you define a value, or press select to assign parameters, variables, functions or programs |
Add an action to elif |
Here you can add function blocks, which will be executed after elif statement is true. |
Pressing
button gives you the option to delete the function block. |
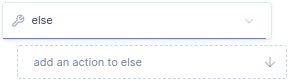
With the logic else function block, you can create a else-statement if the if or elif statement is false the else statement is true. The else function block is always combined with if or/and elif statement. In the Add an action to else you can add function blocks which will be executed after else statement is true.
With the logic
break function block, you can create a break-statement to break out of a loop.

With the
loop function block, you can create a for loop with iterations. Iterations is the amount of times the loop repeats itself and can be set with amount (default setting is infinity). With the add an action to loop you can add function block that are executed each iteration.
With the
wait function block, you can create a wait-statement. The wait statement is used to suspend the execution program until some condition are satisfied, like a true statement or timeout is done.
| Bar | Description |
|---|---|
timeout(s) |
The wait function can be used as timeout, here you can define the timeout in seconds. Default setting is infinity. |
parameter |
With parameter you can set a target parameter. |
value |
In value you can specify a condition for the target parameter. if the condition is met it returns true statement. |
With the group function block, you can create a group. With the name you can assign a name to the group. In the Add an action to group you can add function blocks which will be executed after if the group is executed. Groups can be mode to create structure in your program.
With the comment function block, you can create a comment. With the short you can assign a comment title/shot description and the full comment can be written in long.