Move function block
Move function block
2 minute read
With the
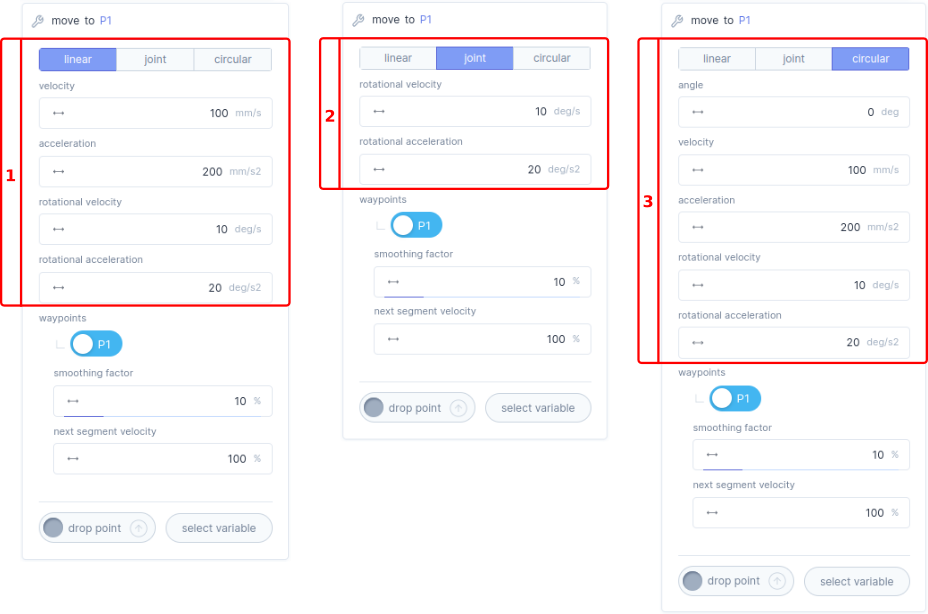
move function block, you can move the robot by means of defining a path express in waypoints. You can assign a variables like points to waypoints. The robot can move to these waypoints in three different ways: linear, joint or circular. The path from one waypoint to another is called a segment and can be parametrized as described in the table below.
| Bar | Description |
|---|---|
| Linear | If you select linear mode the motion between the specified waypoints is executed in cartesian-space. |
Velocity |
Here you can define the velocity
of the linear movement in mm/s. |
Acceleration |
Here you can define the acceleration
of the linear movement in mm/s2. |
Rotational velocity |
Here you can define the rotational velocity
of the axis orientation in deg/s. |
Rotational acceleration |
Here you can define the rotational acceleration
of the axis orientation in deg/s2. |
| Joint | If you select joint mode, the motion between the specified waypoints are executed in joint-space. |
Rotational velocity |
Here you can define the rotational velocity
of the joints in deg/s. |
Rotational acceleration |
Here you can define the rotational acceleration
of the joints in deg/s2. |
| Circular | If you select circular mode, the motion between the specified waypoints is executed as a circular motion throughout the waypoints. |
Angle |
Here you can define the maximum allowable angle
of the motion deg. |
Velocity |
Here you can define the velocity
of the circular movement in mm/s. |
Acceleration |
Here you can define the acceleration
of the circular movement in mm/s2. |
Rotational velocity |
Here you can define the rotational velocity
in deg/s of the axis orientation in deg/s. |
Rotational acceleration |
Here you can define the rotational acceleration
in deg/s2 of the axis orientation in deg/s2. |
| General | In here you can assign a variable to the waypoint. |
Waypoint |
A waypoint is a variable like a geometric point to which the robot can move, you can have multiple waypoints in one
move function block. |
Smooth factor |
With smooth factor
you can smooth out the motion path between segments. This factor can be adjust in a range of 0 till 50%. |
Next segment velocity |
With next segment velocity
you can change the velocity for the next segment, the next segment velocity is defined as % of the parametrized initial velocity. |
Pressing
button gives you the option to delete the function block. |