Simulation Mode
2 minute read
The main purpose of using simulation mode is to create a application without having your physical hardware connected, for this the following tasks are required:
- Enable simulation mode in config.json
- Set simulation parameters inside linking.json
- Add simulated ECAT-devices inside ECAT-Tool
- Link simulated ECAT-device parameters to motorcortex parameters
Note
For simulation, it can be that some safety parameters need to be overwritten like a physical E-stop button, this is done by set parameter inside linking.json.
The next steps will explain you in detail how to set up your application in simulation mode:
-
Inside config.json, set system mode to
Simulation. -
In simulation mode, linking with systemMode:
"Simulation",and"All",are applied and can be adjusted in the xxx.link.json. -
In the Domain Configuration Panel you can enable the
Simulationswitch, but this is not necessary because the system is inSimulation mode. Simulation of a domain is only required inproductionmode, for example if you want tosimulateone or multiple etherCAT devices.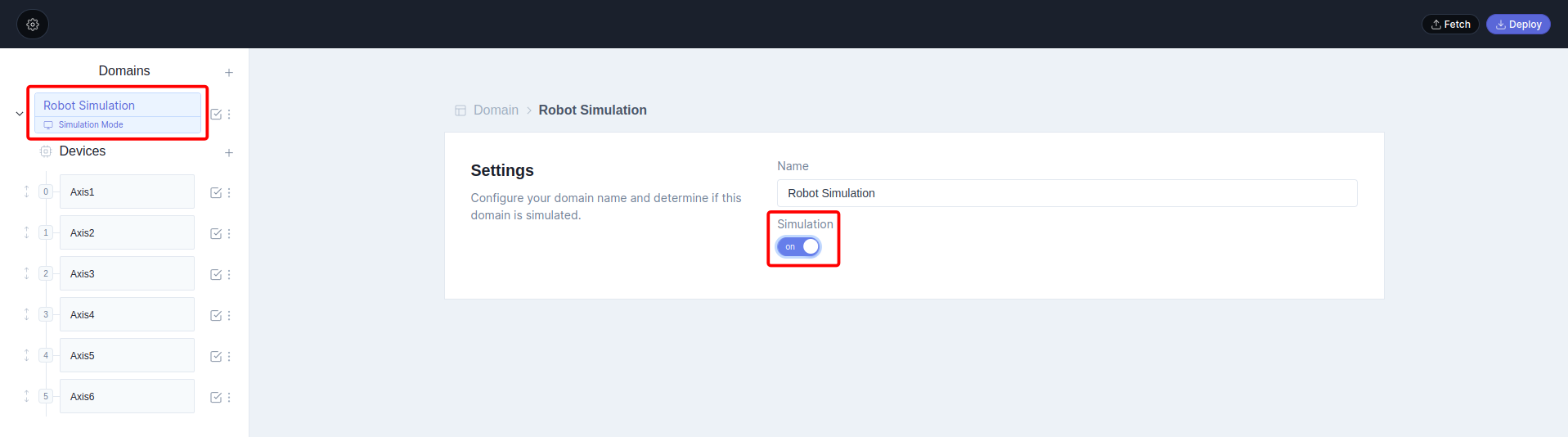
-
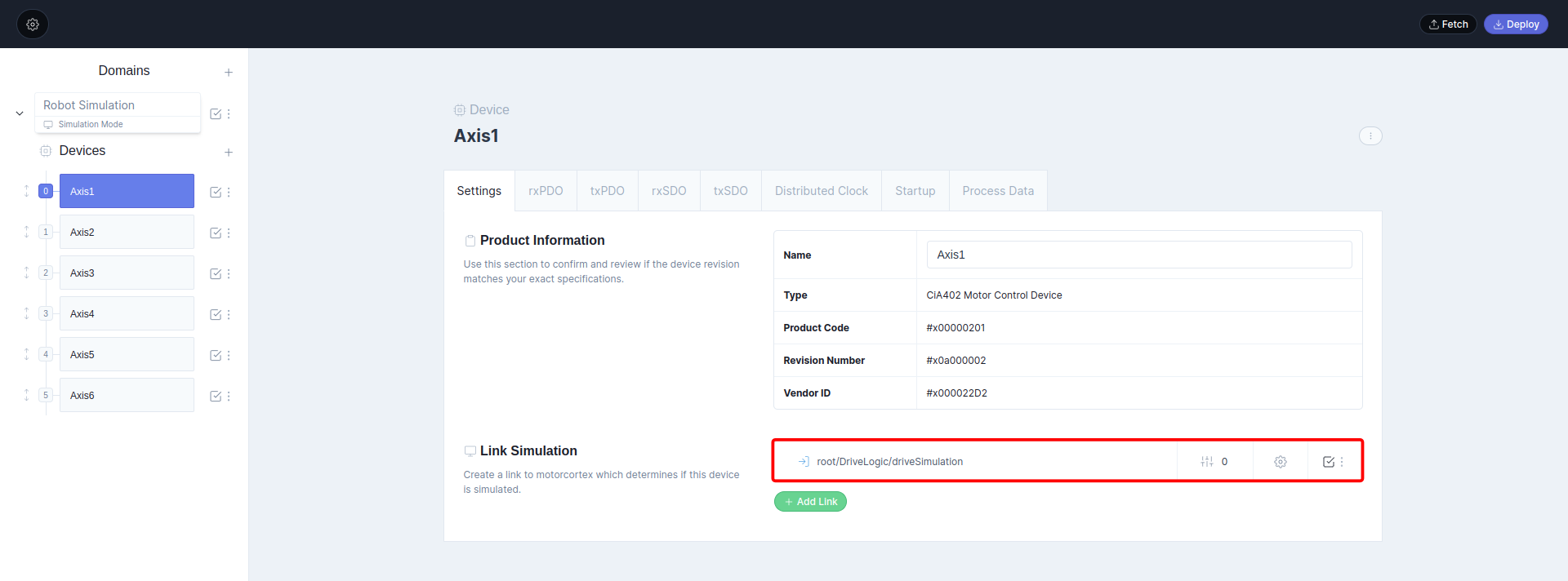
Each
domaincan contain multipleetherCAT devices. In order to simulate the device PDO’s, you have to assign a simulation link to each simulated etherCAT device, so motorcortex knows that the device is included to the simulator. TheLink Simulationshould be assigned to the following path:root/DriveLogic/driveSimulation.Note
Beware to assign the correct channel to the devices, linking of multiple devices to the same channel will result in improper simulated etherCAT devices!
-
EtherCAT devices contain
rxPDOandtxPDOparameters that can be linked to a path, for simulation use:root/Simulator/.... For example target position should be linked toroot/Simulator/targetPosition,channel 0because this is linked to the first axis.
Press
simulation switchtheblue, this means that the link is only used if the system is in simulation mode! -
Step 5 can also be used for all
root/Simulator/...parameters:
| PDOmapping: | Description: | Link to Motorcortex Parameter: |
|---|---|---|
| rxPDO | ||
| 0x607A | Target Position | root/Simulator/targetPosition |
| 0x60B2 | Target Offset | root/Simulator/targetTorqueOffset |
| 0x6071 | Target Torque | root/Simulator/targetTorque |
| txPDO | ||
| 0x6064 | Position Actual Value | root/Simulator/positionValue |
| 0x6077 | Torque Actual Value | root/Simulator/torqueValue |
For parameters in an array like root/Simulator/targetPosition you need to define the index, starting at 0 till 5, respectively for axis 1 till 6.
After linking the PDO entries you are able to run the application in simulation mode.