Velocity Transformation
How To Configure Velocity Transformation
less than a minute
After linking the drive’s Target Velocity and Velocity Actual Value to Motorcortex parameters via ECAT-Tool, a conversion gain is essential for accurate unit conversion. This process ensures proper communication and control between the drive and Motorcortex.
Configure velocity transformation via the GUI
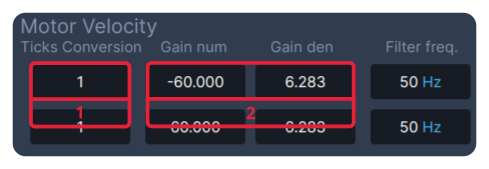
You can define the velocity transformation between the drive unit [mRPM or RPM] and the Motorcortex unit [rad/s] through the GUI under the Axis Settings Tab.
Example conversion between ticks and rad/s:
-
Set the ticks conversion factor for RPM to mRPM:
- If the drive is configured to use
[mRPM]: Enter1000as the conversion factor - If the drive is configured to use
[RPM]: Enter1as the conversion factor
- If the drive is configured to use
-
Define Unit Conversion and Direction:
- Set the conversion ratio:
Gain Num/Gain Den=60/(2π) - This ratio converts between
rad/sandRPM - Configure the axis rotation direction using
Manual Jog, if the 3D visualization movesoppositeto the robot, setGain Num to -60
- Set the conversion ratio:
Configure velocity transformation via the DESK-Tool
To configure velocity transformation for an axis (e.g., axis 1) using the desk-tool:
| GUI parameter: | Description: | Desk Parameter: |
|---|---|---|
| Motor Velocity | ||
| Ticks Conversion | Gain | root/AxesControl/actuatorControlLoops/actuatorControlLoop01/velocityTransformation/transducer/ticksPerRevolution |
| Gain num | Numerator | root/AxesControl/actuatorControlLoops/actuatorControlLoop01/velocityTransformation/transducer/gainNum |
| Gain den | Denominator | root/AxesControl/actuatorControlLoops/actuatorControlLoop01/velocityTransformation/transducer/gainDen |