Configure etherCAT CiA402 Drives
3 minute read
This Chapter provides an example on how to configure two types of etherCAT CiA402 drives:
- Synapticon Somanet Drive.
- Elmo Gold Drive.
[1] Deploy Robot Application
Follow the step in Deploy an Application to deploy the latest robot application to your controller.
[2] Configure EtherCAT
Check the steps in Configure EtherCAT to get and general impression on how to configure an etherCAT device.
Retrieve ESI-file
How to retrieve an ESI-file that matches your drive software version:
Note
If you are already in possession of an correct ESI-file, you can skip the following steps.
In most cases you can request an ESI-file by the drive manufacturer, or by means of the drive manufacturer tools.
Keep in mind that the ESI-file has to match the drive software. If you are unable to identify the software version you can read it directly from the drive.
Check firmware version via remote access
If you logged in remotely via ssh you see in your command line mcx-intel:~$.
-
Check the etherCAT devices on the bus with:
ethercat slaves:0 0:0 PREOP + EK1914, 2 Ch. Safety Input/Output 24V, TwinSAFE 1 0:1 PREOP + EL6910, TwinSAFE PLC 2 0:2 PREOP + EK1110 EtherCAT-Verl�ngerung 3 0:3 PREOP + SOMANET CiA402 Drive 4 0:4 PREOP + 0x0000009a:0x00030924If you do not understand the receiving information use
ethercat slaves --help.
Note
From the ethercat slaves bus information you conduct the following information:
- Somanet at position 3 (-p3)
- Elmo at position 4 (-p4)
-
Display ethercat commands with:
ethercat --help, usesdosto load whole sdo list from the device at position 3ethercat -p3 sdosSearch for something like:
Manufacture Software Version, if you are unable find it you can also use grep command:ethercat -p3 sdos | grep -i softwareThis displays only SDOs that containing
softwarein it:SDO 0x100a, "Manufacture Software Version" 0x100a:00, r-r-r-, string, 264 bit, "Manufacture Software Version" SDO 0x607d, "Software Position limit"Repeat for -p4.
-
Load information stored in 0x100a:00
ethercat upload -p3 0x100a 0:0ethercat upload -p4 0x100a 0:0Returns the device software version:
- Elmo:
Twitter 01.01.16.00 08Mar2020B01G - Somanet:
v5.0.3-16-g58c2f1c06
- Elmo:
-
Check if the software version matches your ESI-file.
Add etherCAT drive to configuration
- Go to ECAT-tool, check your connection.
- Press
+ Add your first devices - Scan bus and add etherCAT devices
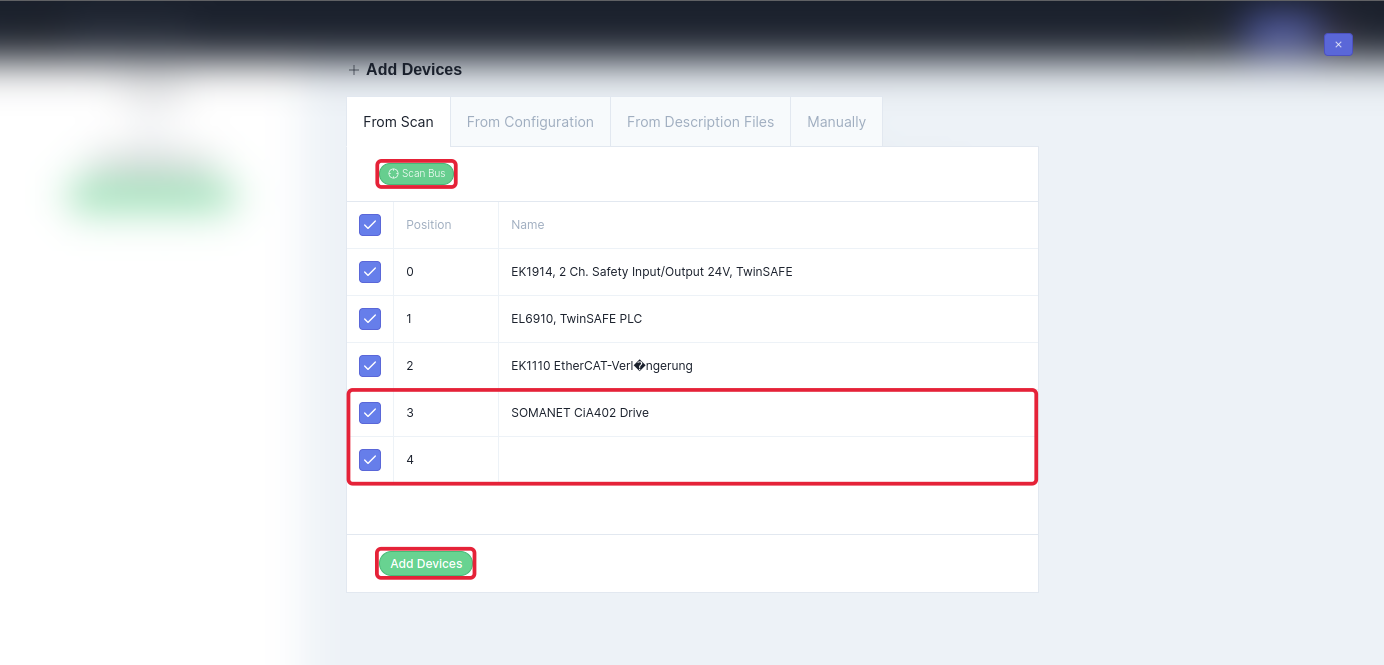
- Add ESI-file to device, press
, select
ESI fileto load and .xml file to the selected device. This procedure is the same for every etherCAT device.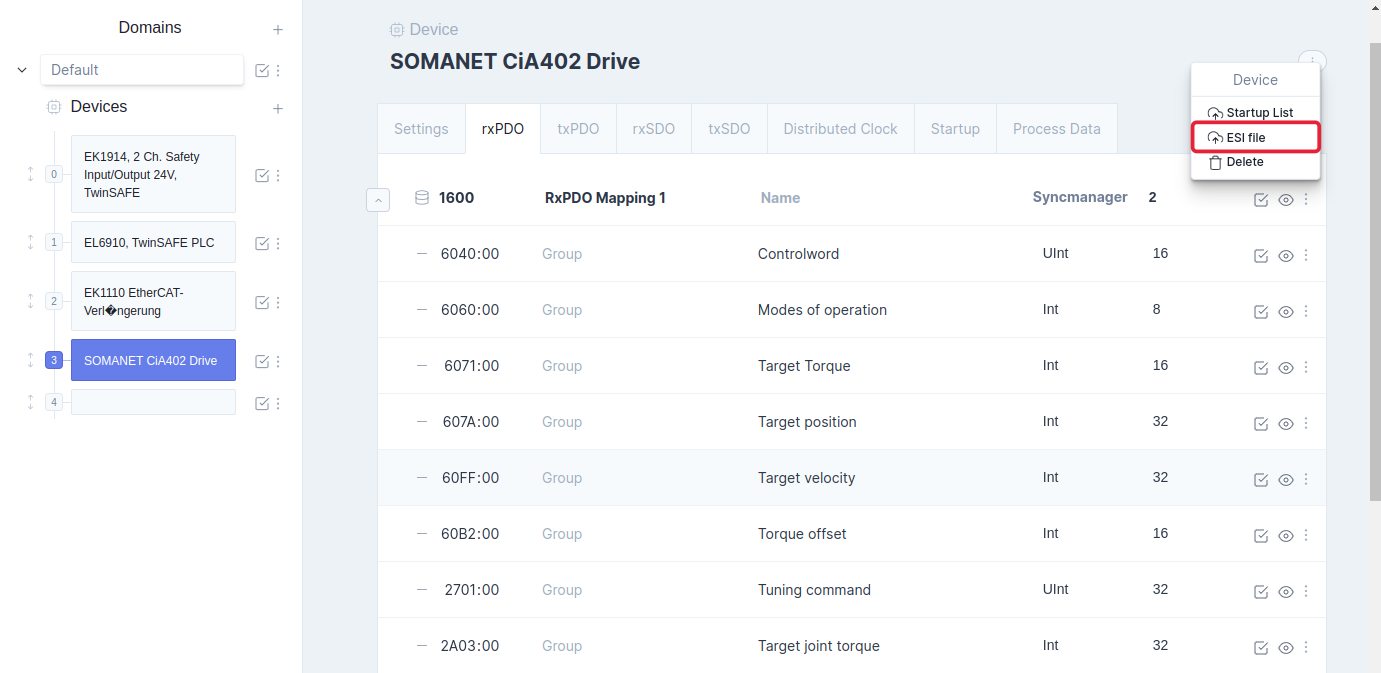
Note
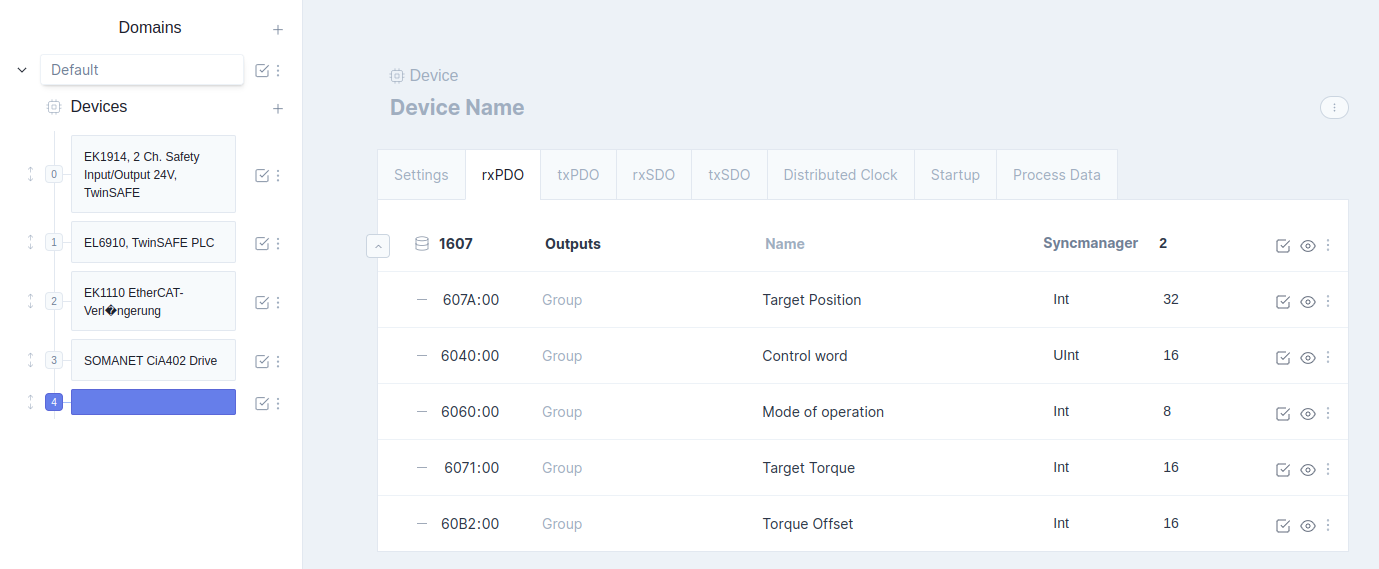
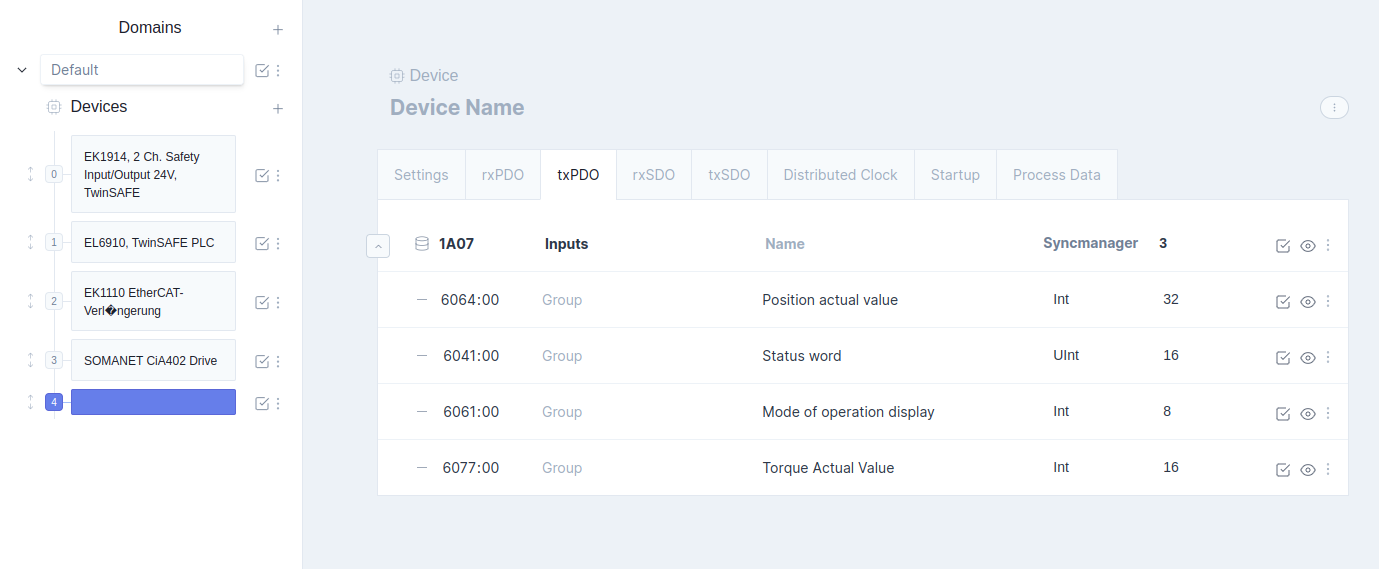
After applying the ESI file to the Elmo Drive you have probably noticed the wide range of PDOs, these are pre-configured with entries. For Elmo drive it is recommended to use a free configurable entrie over a pre-configured. Recommended to use is rxPDO (1607) and txPDO (1A07).
-
Not all drive manufacturers provide a complete ESI-file with all entries configured. If this is not the case, you have to add the entries to the rxPDO and txPDO yourself. An elmo example is given with free configurable rx and txPDOs. Add entries:
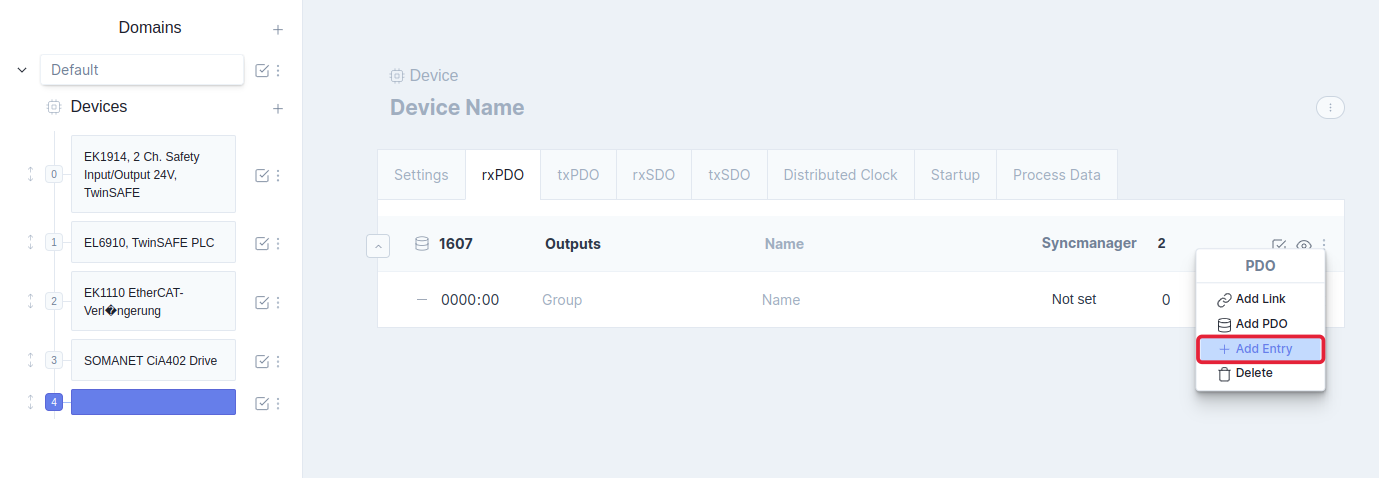
-
Add all necessary tx and rx entries for your application.
Add links to etherCAT configuration
Drive parameter linking to Motorcortex Application is required, to receive and send information from and to the drive.
- Open your etherCAT configuration.
- Add links for Production Mode.
- Add links for Simulation Mode.