Motorcortex Fitlet2
less than a minute
The Motorcortex Fitlet2 is a ideal Industrial Embedded Computer for running Motorcortex. This Fitlet2 comes pre-installed with Vectioneer Linux and Motorcortex-Core libraries. Is also has the Vectioneer Generic-App installed that allows you to control a number of EtherCAT servo drives out of the box.
More detailed information on the Fitlet2 Industrial PC can be found on the FITPC WIKI
Connecting the Fitlet2
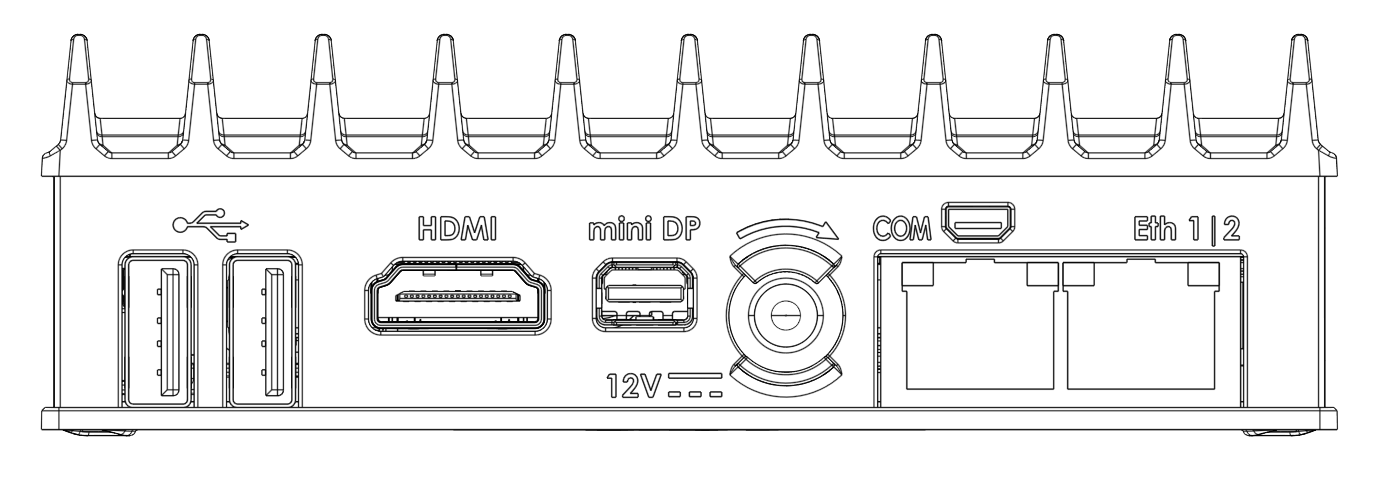
This chapter will explain how to connect the hardware of the Motorcortex Fitlet2. all interfaces are located in the front and the back the figure below provides an overview of all interfaces:
-
2x USB 2.0 (White)
-
1x HDMI
-
1x mini display port
-
1x 12v Power connector
-
1x COM port
-
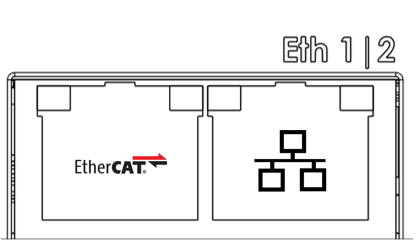
2x RJ45 ports Eth1|2
-
1x power button
-
2x USB 3.0 (Blue)
-
1x micro SD slot
Communication from and to the Motorcortex Fitlet2 will go trough the RJ45 connectors. Eth1 is configured for Ethercat and Eth2 is configured for ethernet connection.