Diagnostics
3 minute read
The Motorcortex Robot App contains a diagnostics tab in which the system and drive diagnostics can be displayed. In this section you will lean how to use the diagnostics tab.
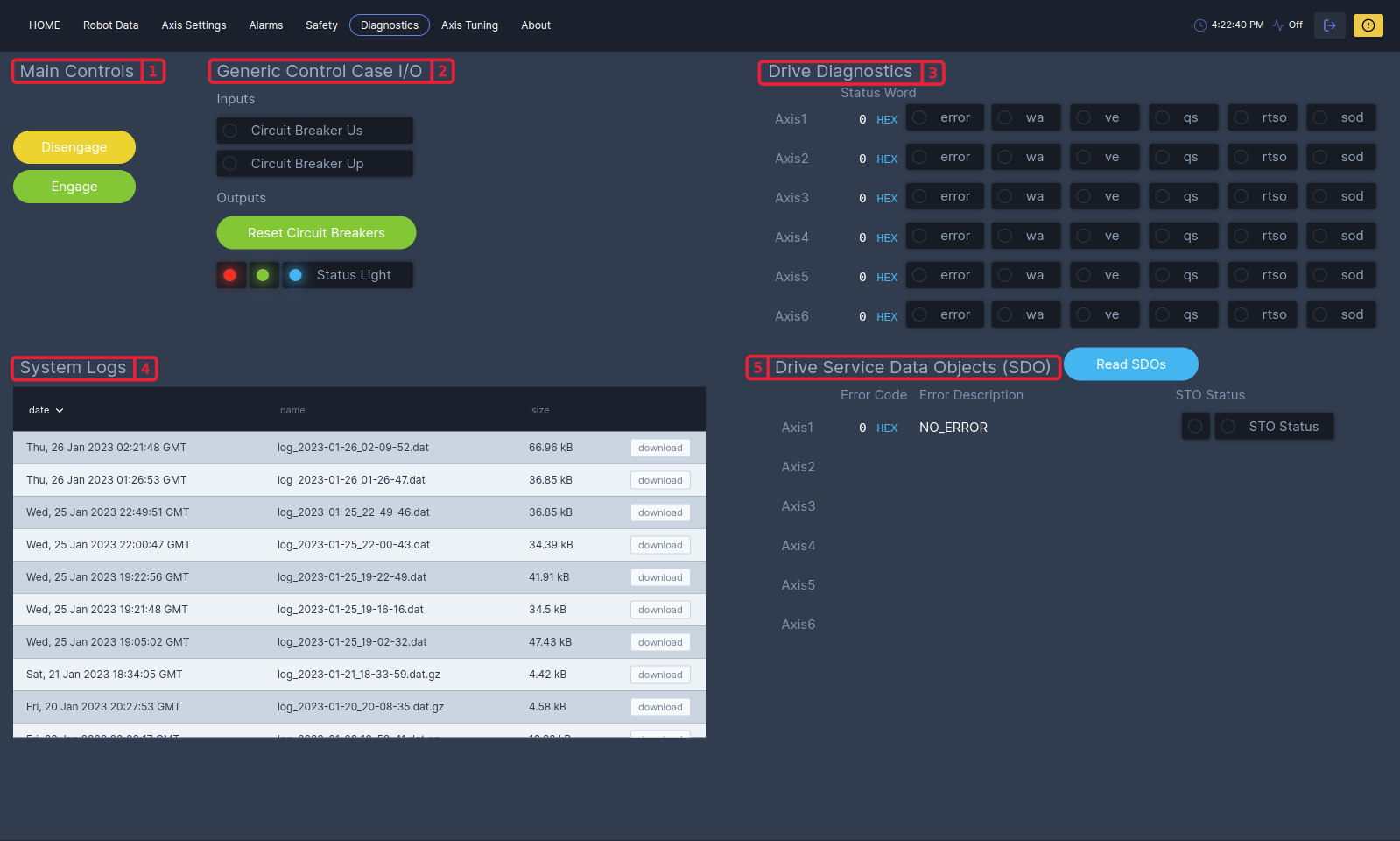
Using the Main Controls you can switch the system on (Engage) and off.
The Drive Diagnostics presents status and warning information from the connected servo drives. For convenience certain standard bits in the Status word are connected to LED indicators that have the following meaning:
| LED | Description | Status Word (binary) |
|---|---|---|
| error | System error | xxxx xxxx x0xx 1000 |
| wa | Warning alert | xxxx xxxx 1xxx xxxx |
| ve | Voltage enabled | xxxx xxxx xxx1 xxxx |
| sod | Switch on disabled | xxxx xxxx x1xx 0000 |
| rtso | Ready to switch on | xxxx xxxx x01x 0001 |
| qs | Quick stop active | xxxx xxxx x00x 0111 |
For more information about enabling the drive via the DS402 state machine, check out the DS402 state machine.
The System Logs provide information about the logs made in the system. System logs are only visible after the application is deployed to the controller. In the system log screen you can press download to save your system log information.
With Drive Service Data Object (SDO), the SDOs are read- ut by means of pressing the Read SDOs button. This will present the data of SDO Error codes with Error Descriptions and the two STO status lights per connected slave. Note that the SDO mappings and meanings are vendor specific so they may not represent the status of your device.
Depending on the connected drive, the error code HEX value differs, the error codes of a Somanet drive can be read out from root/Ethercat/Robot/AxisX/SDOs/Error code. With the error code explanation .json you can link a description to the hex error code.
Error code explanation .json example:
{
"0": "NO_ERROR",
"8736": "DEVICE_INTERNAL_CONTINUOUS_OVER_CURRENT",
"8784": "DEVICE_INTERNAL_SHORT_CIRCUIT",
"9041": "I2T_THERMAL_STATE_LOAD_LEVEL_WARNING",
"12592": "PHASE_FAILURE",
"12593": "PHASE_FAILURE_L1",
"12594": "PHASE_FAILURE_L2",
"12595": "PHASE_FAILURE_L3",
"12816": "DC_LINK_OVER_VOLTAGE",
"12832": "DC_LINK_UNDER_VOLTAGE",
"13105": "FIELD_CIRCUIT_INTERRUPTED",
"16912": "EXCESS_TEMPERATURE_DEVICE",
"17168": "EXCESS_TEMPERATURE_DRIVE",
"21248": "OPERATING_UNIT",
"24592": "SOFTWARE_RESET_WATCHDOG",
"25376": "PARAMETER_ERROR",
"28961": "MOTOR_BLOCKED",
"29440": "SENSOR",
"29952": "COMMUNICATION"
}