Domains Configuration Panel
8 minute read
Domains Configuration Panel
On the left of the ECAT-Tool screen you will find the Domains Configuration Panel. In this panel you can configure the domains for your EtherCAT devices.
EtherCAT devices have to be placed inside a Domain. A Domain is an group of EtherCAT slaves. For your project you can make use of one single domain, or multiple domains. An advantage of multiple domains, is that every domain is separate and can (if configured properly) be set to simulation, while other devices in other domains remain in production.
[1] Add a new etherCAT Device
To add a new device you can click the
Add your first devices button or add devices from the Top Menu Bar.
From this tab you can add EtherCAT devices in several ways:
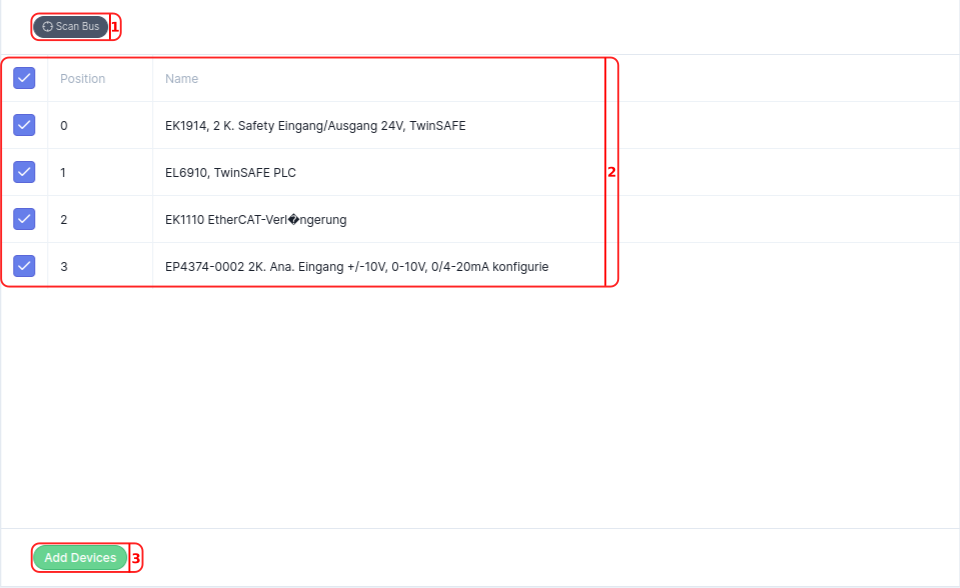
In the From Scan tab, scan the EtherCAT Master to add devices:
-
Press the
Scan Busbutton to detect connected EtherCAT devices. -
Use the
checkboxto include or exclude devices from the list. -
Check
Apply ESI from databaseto automatically apply ESI files from the ESI database to the detected devices. -
Press
Add Devicesto add the selected devices to theDomains Configuration Panel.
The scanned EtherCAT devices now appear in the Domains Configuration Panel and are ready for configuration.
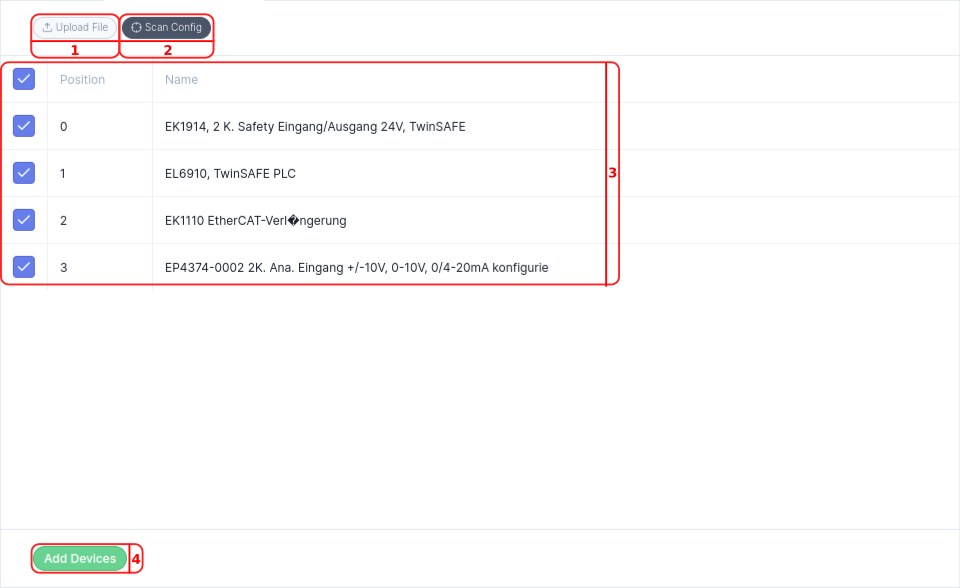
In the From Configuration tab, add devices from an EtherCAT configuration file or from the configuration stored on the Motorcortex controller.
-
To upload an EtherCAT configuration
master.xmlfile to the ECAT-Tool, press theUpload Filebutton. This opens a popup window, allowing you to browse and select a savedmaster.xmlconfiguration. -
If a configuration is deployed to the Motorcortex controller, fetch the EtherCAT configuration by clicking the
Fetchbutton. -
The detected EtherCAT devices from the file or fetched configuration are added to the list. Use the
checkboxto include or exclude devices. -
Click
Add Devicesto add the selected devices to theDomains Configuration Panel.
The selected EtherCAT devices now appear in the Domains Configuration Panel and are ready for configuration.
-
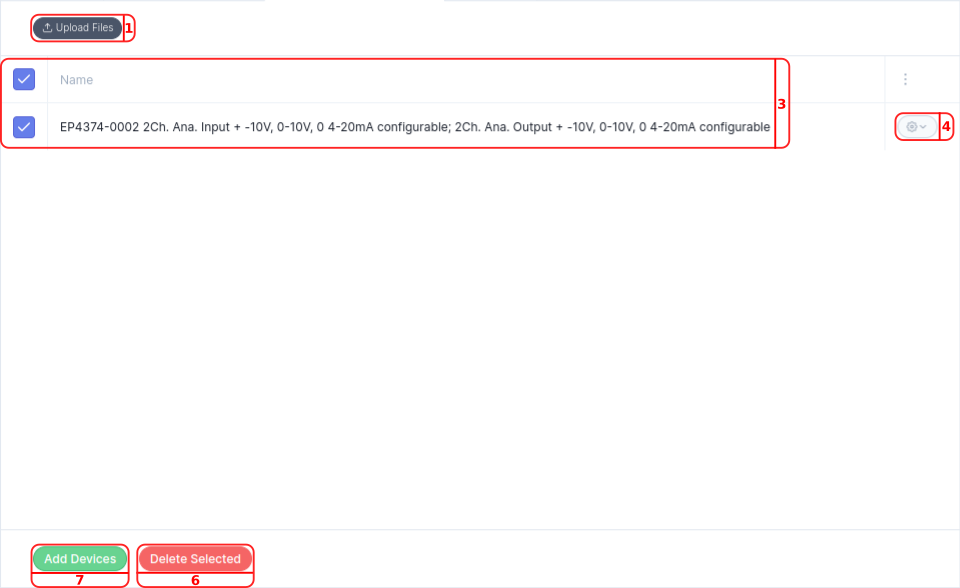
Press the
Upload Filesbutton to upload locally storedESI.xmlfiles. -
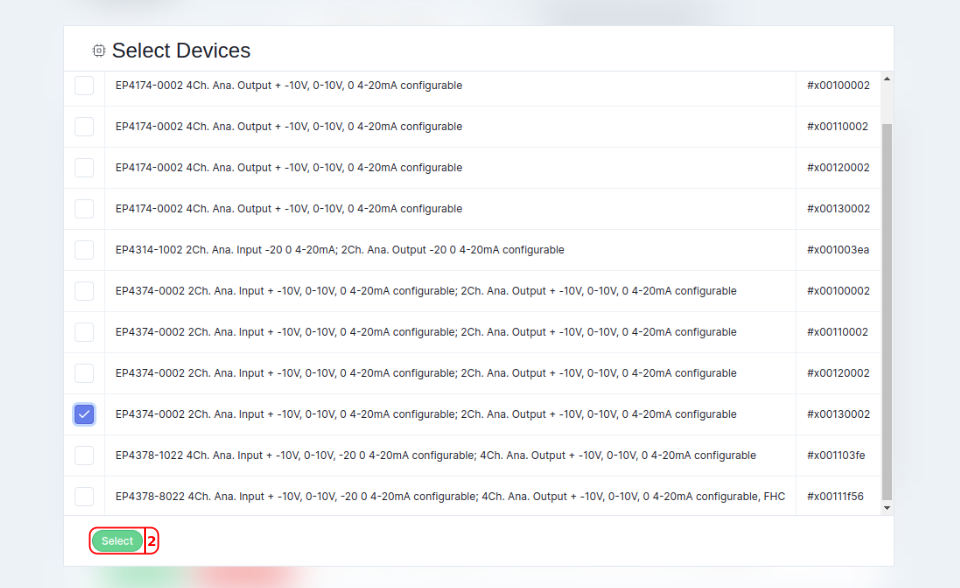
ESI files contain information about a range of devices. In the
Select Devicescreen, use thecheckboxto include or exclude devices, then press theSelectbutton to add them to theFrom Description Filetab. -
In the list of uploaded devices, use the
checkboxto include or exclude devices for theDomains Configuration Panel. -
Press the
Editbutton to access options toDeleteorEdita device. -
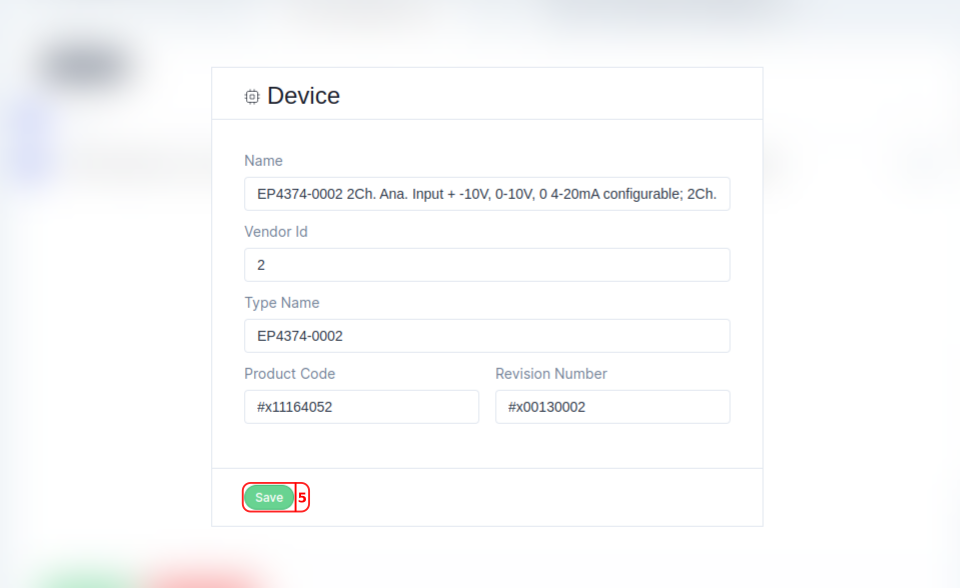
In the
Edit Devicescreen, you can change device information. Press theSavebutton to save your changes. -
Press the
Delete Selectedbutton to remove the selected devices. -
Press
Add Devicesto add the selected devices to theDomains Configuration Panel.
The selected EtherCAT devices now appear in the Domains Configuration Panel and are ready for configuration.
-
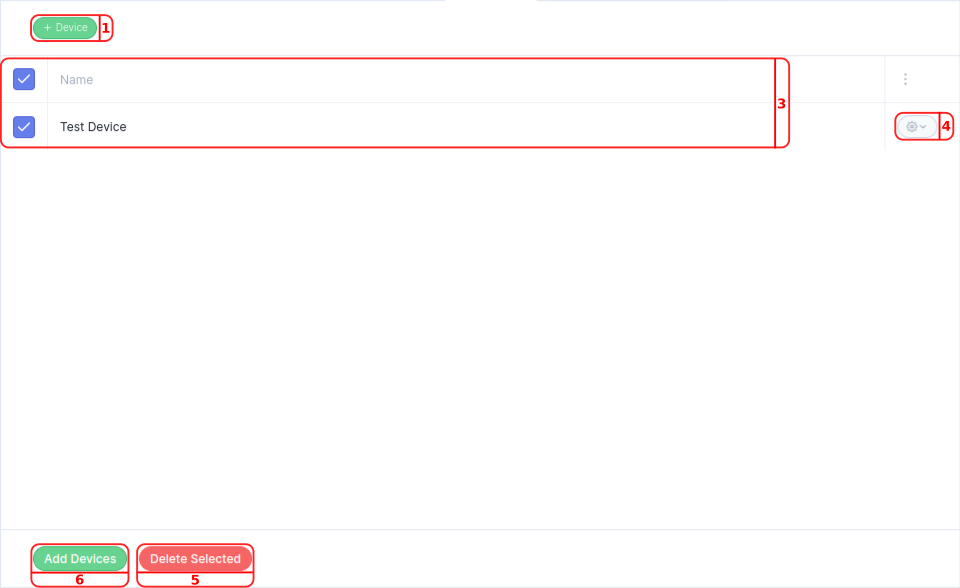
Press the
Devicebutton to add a new empty device. -
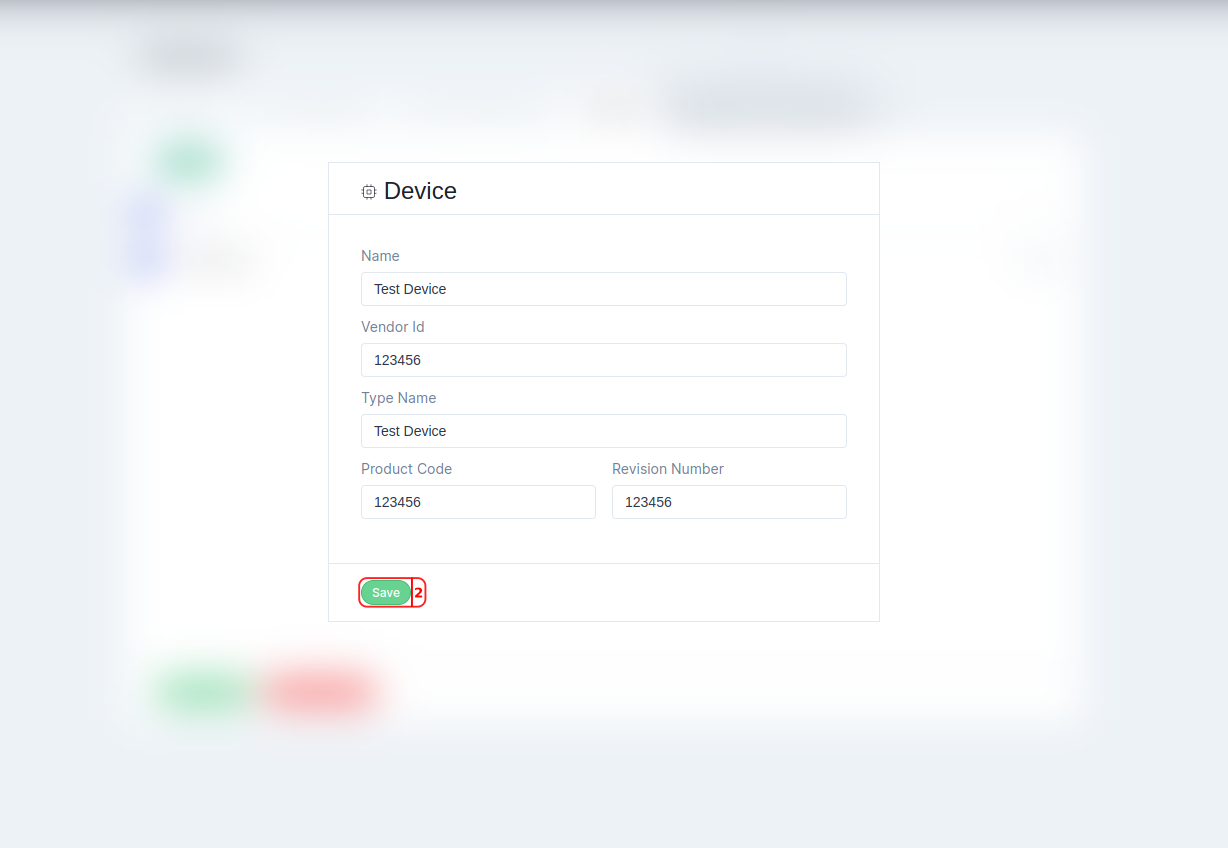
In the
Devicescreen, fill in the device information. Press theSavebutton to add the new device to theManuallytab. -
In the list of editable devices, use the
checkboxto include or exclude devices for theDomains Configuration Panel. -
Press the
Editbutton toDeleteorEdita device. -
Press the
Delete Selectionbutton to remove the selected devices. -
Press
Add Devicesto add the selected devices to theDomains Configuration Panel.
The selected EtherCAT devices now appear in the Domains Configuration Panel and are ready for configuration.
After having devices added the Domains Configuration Panel should look like this.
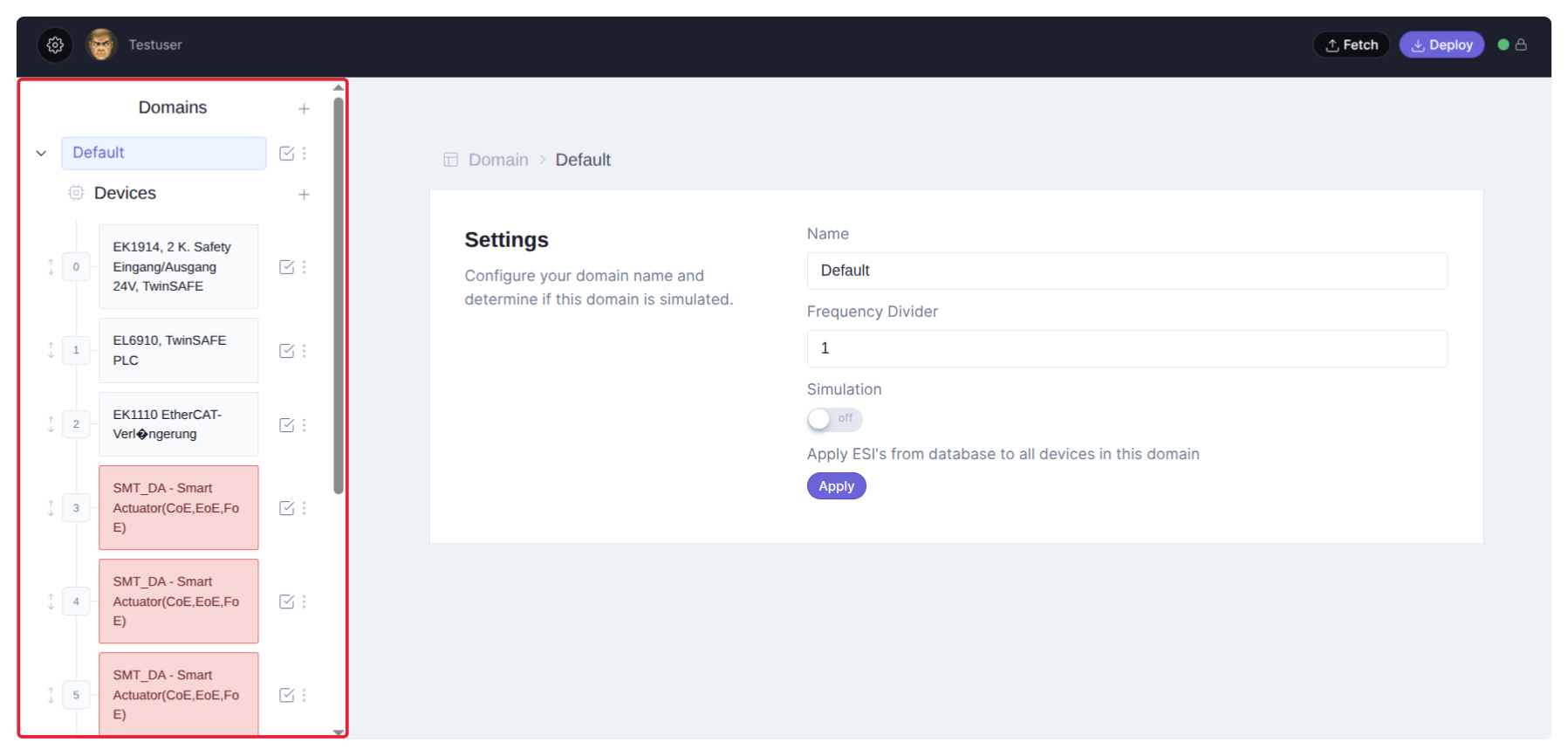
- The number in front of each device is called a slave position number and should be configured.
- By pressing the
Checkboxyou can include or exclude the device from the EtherCAT message, this means that the device will excluded from the EtherCAT Configuration. - The
Device Nameand other settings can be configured in the Device Configuration Panel. Devices with the same name are displayed in red. It is recommended to give each device a unique naming,
[2] Configure EtherCAT Slave Position
The slave position can be configured either via an absolute bus position, or a stored identifier called alias, or a mixture of both.
Use absolute bus position (default):
The absolute bus position is automatically assigned by the EtherCAT Master during a network scan, based on the physical order of devices in the daisy-chain topology.
If a EtherCAT device is removed, replaced, or wiring is changed, the position may shift and change, which can lead to device configuration mismatch unless aliases are used.
-
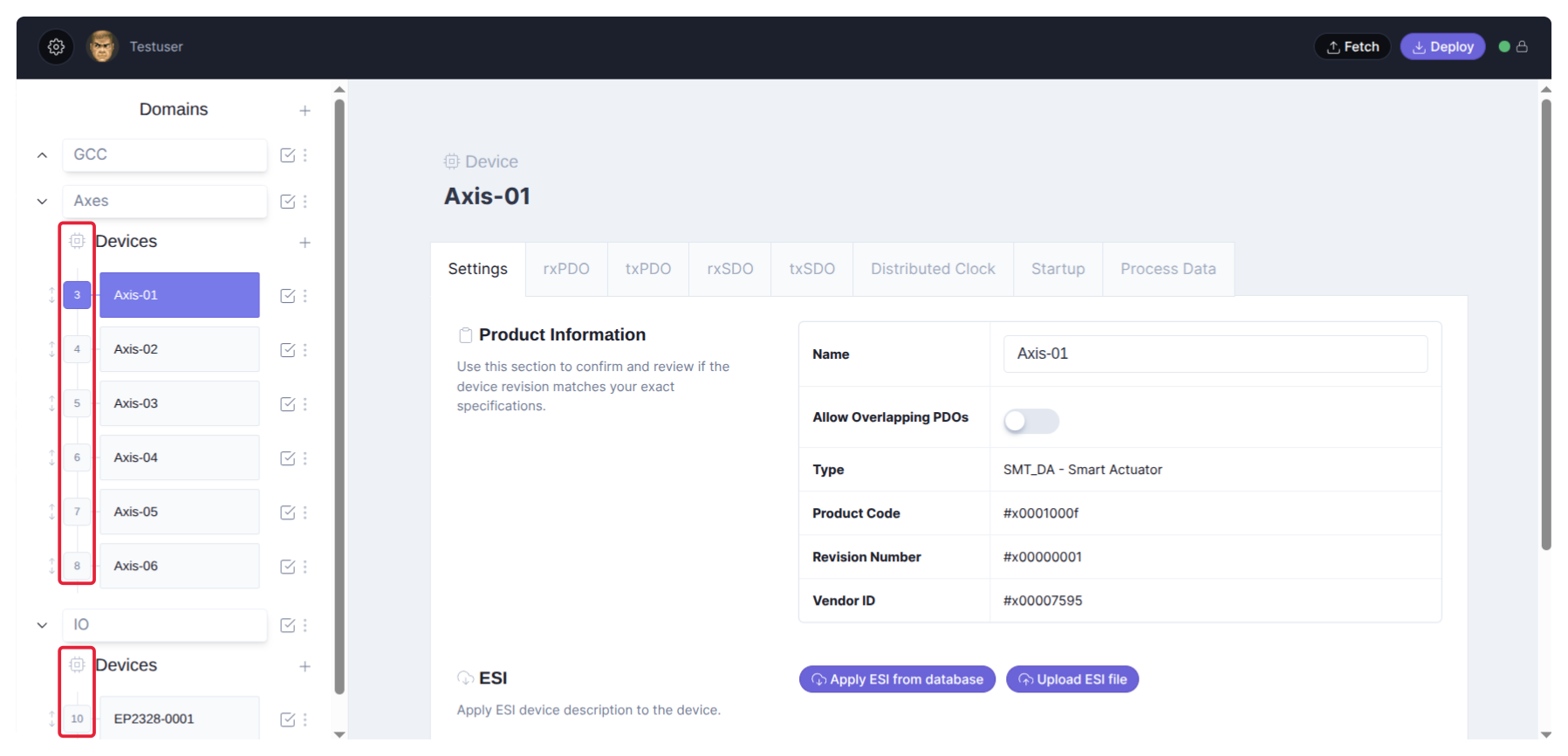
The configured
absolute bus positionshould match theabsolute bus positiondisplayed on the bus and can be shown via the cockpit tool. -
Open cockpit tool navigate to
Terminal. -
Use the command
ethercat slavesto display slaves on the bus:mcx-intel:~$ ethercat slaves 0 0:0 OP + EK1914, 2 K. Safety Eingang/Ausgang 24V, TwinSAFE 1 0:1 OP + EL6910, TwinSAFE PLC 2 0:2 PREOP + EK1110 EtherCAT-Verl�ngerung 3 0:3 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 4 0:4 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 5 0:5 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 6 0:6 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 7 0:7 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 8 0:8 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 9 0:9 PREOP + SMT_IO - Smart Actuator 10 0:10 OP + EP2328-0001 4 K. Dig. Ein, 3ms, 4 K. Dig. Aus 24V, 2A, M8Detailed explanation:
3 0:3 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) | | \- Decimal relative position to the last | | slave with an alias address set. | \- Decimal alias address of this slave (if set), | otherwise of the last slave with an alias set, | or zero, if no alias was encountered up to this | position. \- Absolute ring position in the bus. -
Now you can configure, the
absolute bus positioninside theECAT-Tool.
Use alias addressing
Alias addressing allows a device to be uniquely identified regardless of its absolute bus position. This is useful for modular designs and for replacing devices without needing to precisely match wiring order.
-
The
alias addressis a fixed number stored in a slave’s EEPROM, and can be configured via the cockpit tool. -
Open cockpit tool navigate to
Terminal. -
Use the command
ethercat slavesto display slaves on the bus:mcx-intel:~$ ethercat slaves 0 0:0 OP + EK1914, 2 K. Safety Eingang/Ausgang 24V, TwinSAFE 1 0:1 OP + EL6910, TwinSAFE PLC 2 0:2 PREOP + EK1110 EtherCAT-Verl�ngerung 3 0:3 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 4 0:4 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 5 0:5 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 6 0:6 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 7 0:7 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 8 0:8 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 9 0:9 PREOP + SMT_IO - Smart Actuator 10 0:10 OP + EP2328-0001 4 K. Dig. Ein, 3ms, 4 K. Dig. Aus 24V, 2A, M8 -
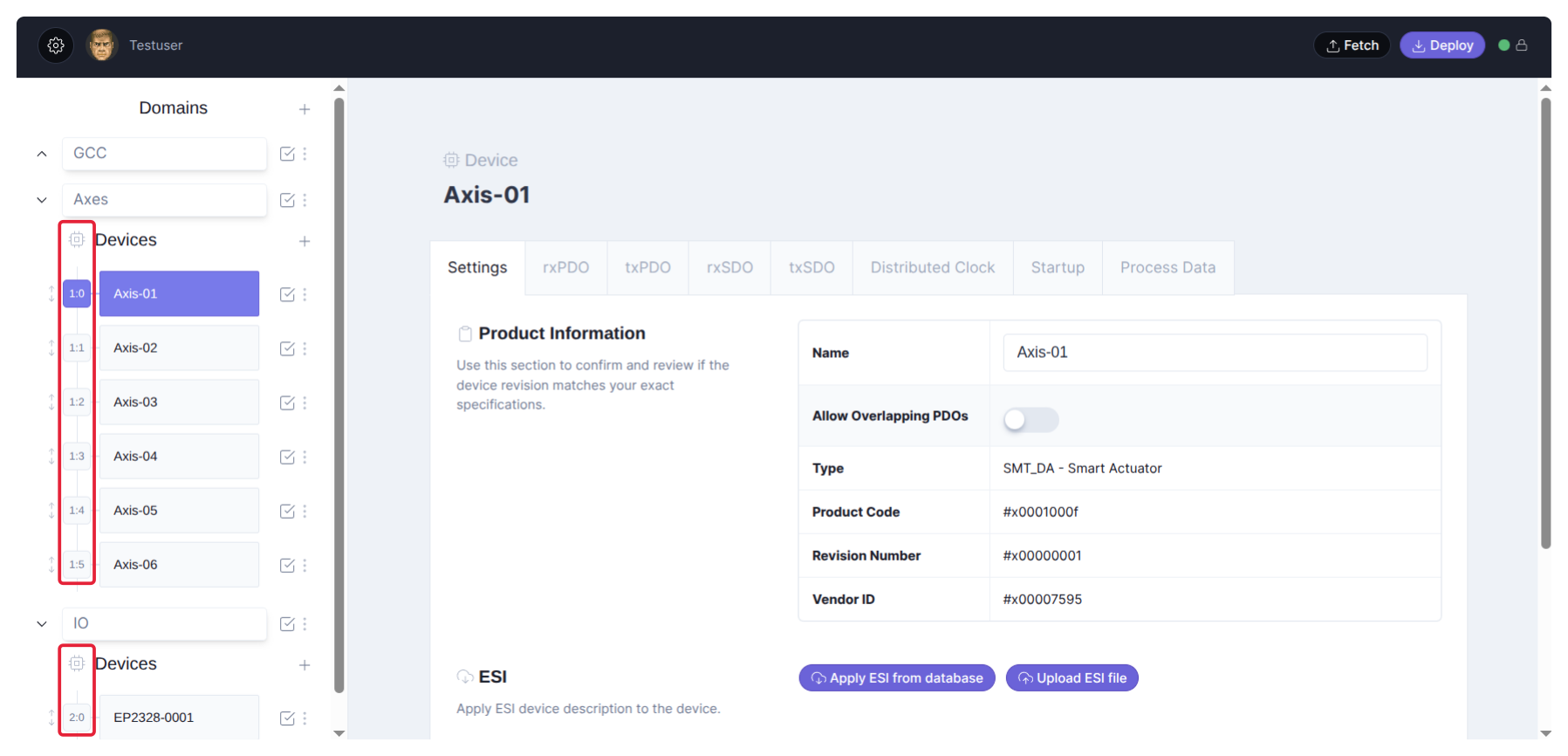
Use the command:
ethercat -p3 alias 1to writealias address 1to theslave on absolute ring position 3and onwards:mcx-intel:~$ ethercat -p3 alias 1 mcx-intel:~$ ethercat -p10 alias 2 mcx-intel:~$ ethercat slaves 0 0:0 OP + EK1914, 2 K. Safety Eingang/Ausgang 24V, TwinSAFE 1 0:1 OP + EL6910, TwinSAFE PLC 2 0:2 PREOP + EK1110 EtherCAT-Verl�ngerung 3 1:0 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 4 1:1 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 5 1:2 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 6 1:3 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 7 1:4 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 8 1:5 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) 9 1:6 PREOP + SMT_IO - Smart Actuator 10 2:0 OP + EP2328-0001 4 K. Dig. Ein, 3ms, 4 K. Dig. Aus 24V, 2A, M8Detailed explanation:
3 1:0 OP + SMT_DA - Smart Actuator(CoE,EoE,FoE) | | \- Decimal relative position to the last | | slave with an alias address set. | \- Decimal alias address of this slave (if set), | otherwise of the last slave with an alias set, | or zero, if no alias was encountered up to this | position. \- Absolute ring position in the bus. -
Now you can configure, the
alias addressinside theECAT-Tool. Example:Alias 1, relative position 0is configured as1:0.
- Remark it is possible the combine
Alias AddressandAbsolute Bus Positions.
[3] Add and configure a new Domain
- In the
Domain Configuration Panel, add domains by pressing the button or the button. This action automatically generates a new (Untitled) domain.
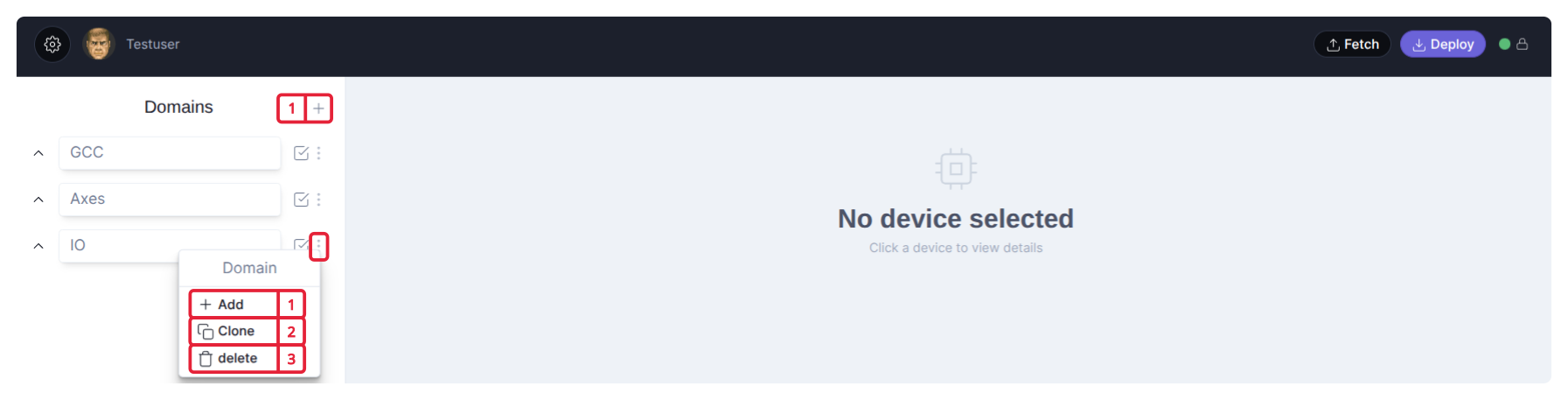
-
Clone a domain, including its devices, by pressing the button.
-
Delete a domain by pressing the button.

-
The name of the domain can by changed in the
domain settings panel. -
For each domain, set the fieldbus_task_time using the
Frequency divider(default = 1). This setting only affects the EtherCAT devices within the selected domain.
Domain Simulation Settings:
If the system is running in Production mode, complete Step 6 to simulate a domain and its devices.
-
Each domain can operate in either Production or Simulation mode. Enable the
Simulation flagto configure the domain for simulation. All devices in the domain will be simulated, and aSimulation Modenotification will appear to indicate this status. -
By pressing the
Checkboxyou can include or exclude the domain from the EtherCAT message, this means that the domain will excluded from the EtherCAT Configuration.