Production Mode
2 minute read
The main purpose of using production mode is to test you application on your physical hardware, for this the following tasks are required:
- Enable production mode in config.json
- Set production parameters inside linking.json
- Add ECAT-devices inside ECAT-Tool
- Link ECAT-device parameters to motorcortex parameters
The next steps will explain you in detail, how to set up your application in production mode:
-
Inside config.json, change system mode to
Production. -
In production mode, linking with systemMode:
"Production",and"All",are applied and can be adjusted in the xxx.link.json. -
In the Domain Configuration Panel the
Simulationswitch should be disabled.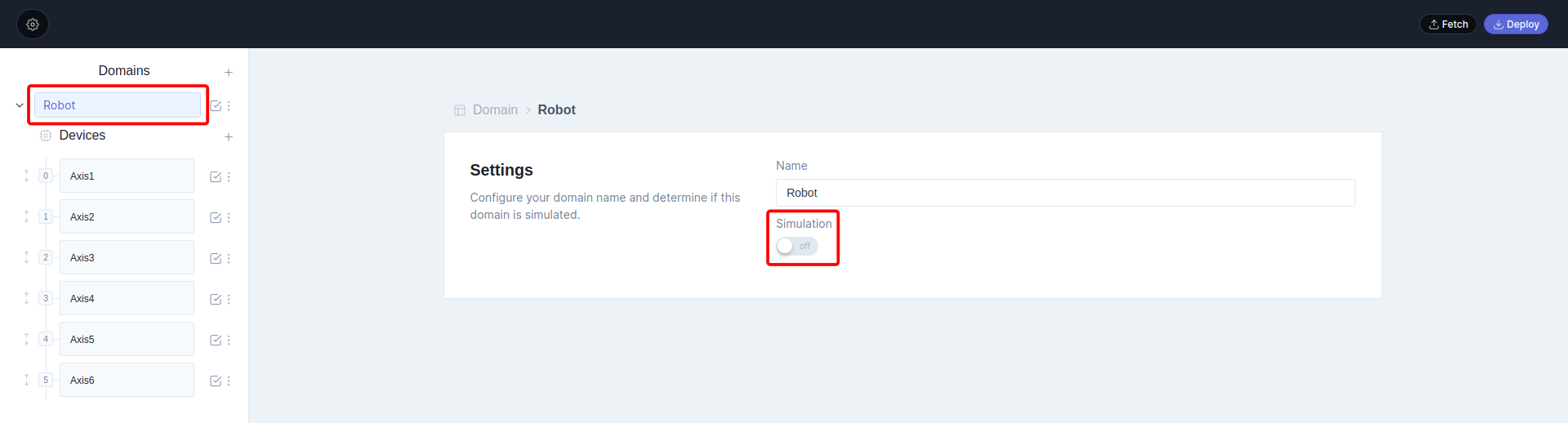
-
Each
domaincan contain multipleetherCAT devices. The link simulation should be empty because, the system is inproductionmode. -
EtherCAT devices contain
rxPDOandtxPDOparameters which should be linked to motorcortex parameters.
-
Perform
step 5for all PDO Mappings.
| PDOmapping: | Description: | Link to Motorcortex Parameter: |
|---|---|---|
| rxPDO | ||
| 0x6040 | Control Word | root/DriveLogic/driveControlWord |
| 0x6060 | Modes of Operation | root/DriveLogic/driveOpMode |
| 0x607A | Target Position | root/AxesControl/actuatorControlLoops/actuatorControlLoop0X/motorPositionTarget |
| 0x60FF | Target Velocity | root/AxesControl/actuatorControlLoops/actuatorControlLoop0X/motorVelocityTarget |
| 0x60B2 | Torque Offset | root/AxesControl/actuatorControlLoops/actuatorControlLoop0X/motorTorqueOffsetTarget |
| 0x6071 | Target Torque | root/AxesControl/actuatorControlLoops/actuatorControlLoop0X/motorTorqueTarget |
| txPDO | ||
| 0x6041 | Status Word | root/DriveLogic/driveStatusWord |
| 0x6064 | Position Actual Value | root/AxesControl/actuatorControlLoops/actuatorControlLoop0X/motorPositionActual |
| 0x606C | Velocity Actual Value | root/AxesControl/actuatorControlLoops/actuatorControlLoop0X/motorVelocityActual |
| 0x6077 | Torque Actual Value | root/AxesControl/actuatorControlLoops/actuatorControlLoop0X/motorTorqueActual |
| 0x2A00 | TorqueSensor Actual Value | root/AxesControl/actuatorControlLoops/actuatorControlLoop0X/sensorTorqueActual |
The X in actuatorControlLoop0X can have a value from 1 till 6 (actuatorControlLoop01 till actuatorControlLoop06) respectively for axis 1 till 6. For parameters in an array like root/DriveLogic/driveControlWord you need to define the index, starting at 0 till 5, respectively for axis 1 till 6.
After linking the PDO entries you are able to run the application in production mode.
Older Version: